





简介:
本作品为STM32四轴无人机遥控器,可与无人机实现配对,通过遥控器控制无人机离地飞行(无法单独使用,需要配合无人机方可使用)。
一、产品简介
本作品为STM32四轴无人机遥控器,可与无人机实现配对,通过遥控器控制无人机离地飞行(无法单独使用,需要配合无人机方可使用)。大家可根据本设计,改进、开发更好的作品。
二、 应用场景
- 可供无人机爱好者自行组装测试,以低成本拥有一架自己组装的简易无人机遥控器。
- 供电子爱好者学习,用于DIY制作。
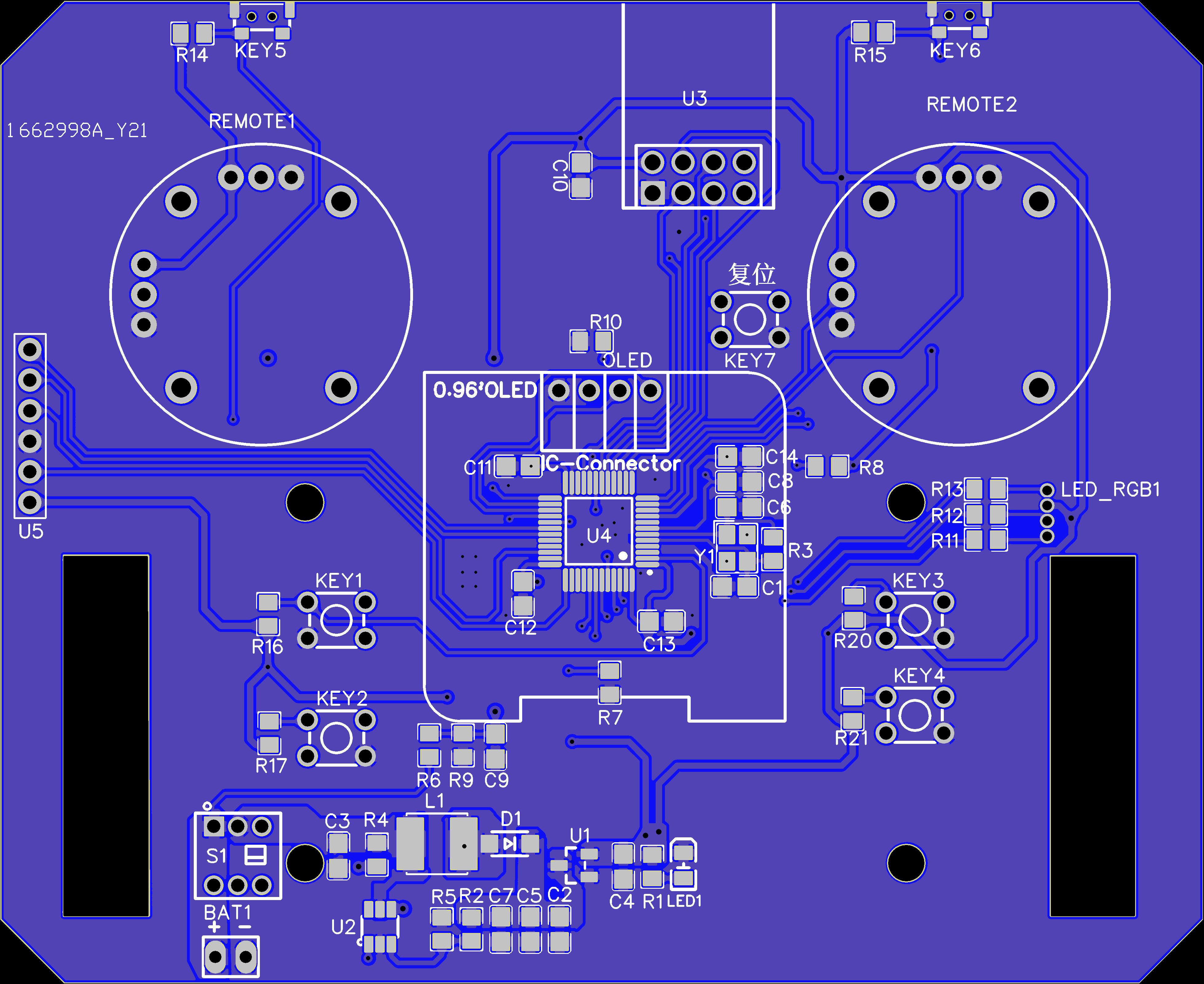
三、产品概述
- 采用72M主频的STM32F103C8T6作为主控。
- 采用亿佰特E01-ML01DP5模块用于通讯,并加装3dBi天线。
- 装有一块0.96寸OLED,用于显示信息。
- 焊接后需要烧录程序,需要一定的调试经验。
- 装有三原色指示灯,方便调试判断连接状态。
- 通过修改程序可以兼容其他使用NRF24L01模块的无人机。
四、产品参数
- 电源输入:DC3.7V
- 通信频率:2.4GHz
- 烧录接口:SWD
- 通讯接口:IIC、SPI 、UART
- PCB参数:两层设计,尺寸为10*8.17cm
五、使用说明
本作品需要搭配无人机飞控使用,详情见我主页,STM32四轴无人机(一)——飞控板。
电路板焊接完成后烧录程序,根据指示灯判断是否正常。以下为指示灯颜色代表信息:
- 蓝色闪烁,信号丢失。
- 绿色常亮,信号正常。
六、备注
- 电池建议选用航模电池,当无人机电量较低时可以更换。
- 部分器件不适合SMT,因此部分器件设置了自行焊接。
- 左侧遥感为油门,右侧为方向,左侧为10k阻值上下不回中左右会中,右侧为10k阻值上下、左右均回中。
- 设计有3MM铜柱通孔,可以设计背板连接,用于放置电池。
- 遥控器与无人机都开机后,左侧遥感自下向上缓拉,进行配对,若OLED显示配对失败,请复位飞控和遥控器;随后自下向上缓拉,即可完成对频;对频成功后两侧遥感呈内八状约3s即可解锁。
- 遥控器预留6个按键通道,可根据个人喜好编辑按键功能。
- 制作成本约50元。
- 本作品采用Keil5 MDK5.24开发,采用ST-link V2进行程序烧录,不需要下载额外的固件,打开程序连接线路下载即可,或是使用附件中的HEX文件,用小助手下载。
- 本作品搭配无人机使用,详情见我主页,STM32四轴无人机(一)——飞控板。
- 使用上还有几个需要注意的点,可在附件中查看。
七、测试视频
视频展示遥控器与无人机主控板实现配对通信,并展示操作方法并进行试飞。

点赞
描述
PCB
元件清单
原理图
附件
讨论