





基于ESP32的四轴飞控
1产品简介
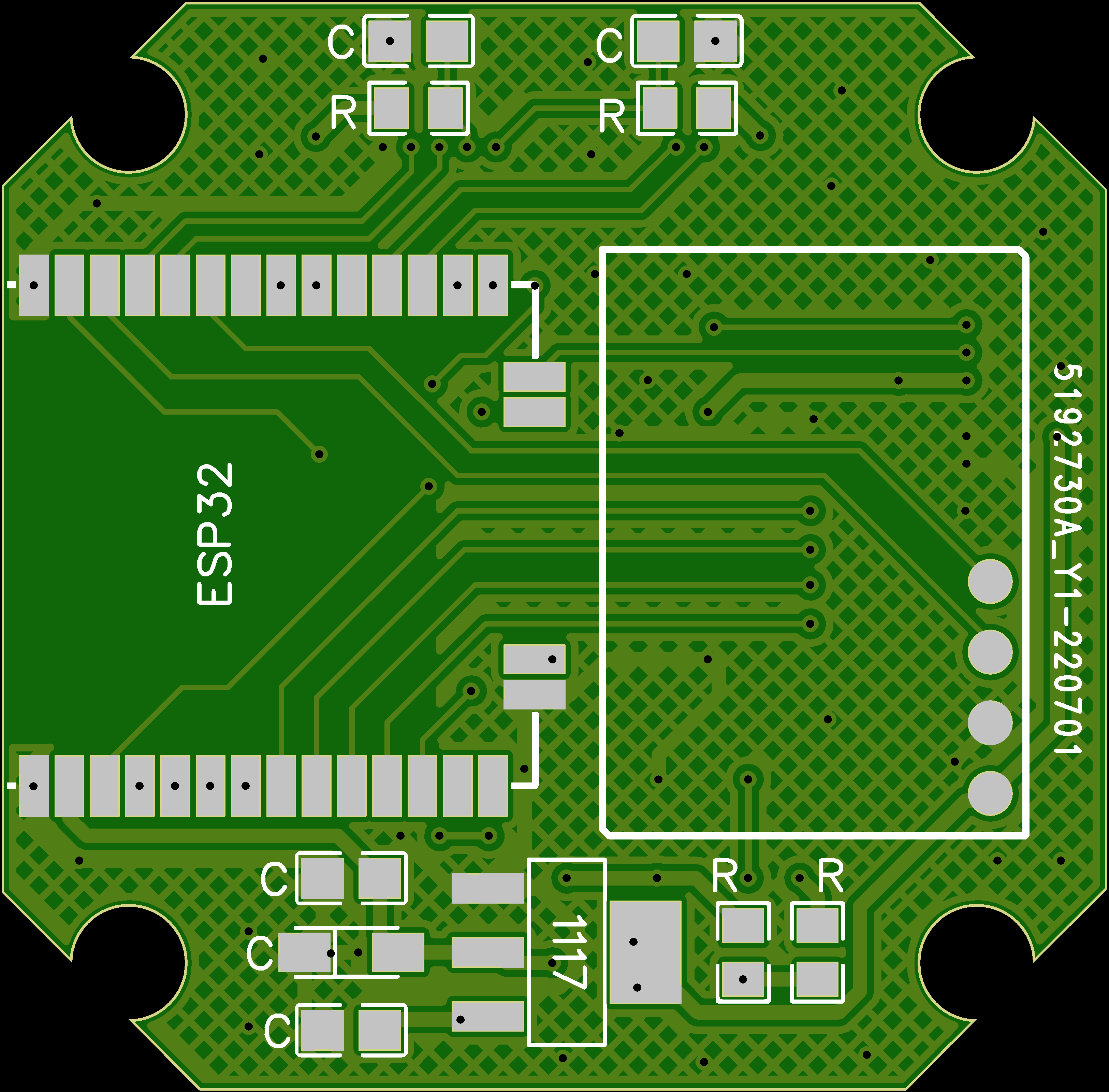
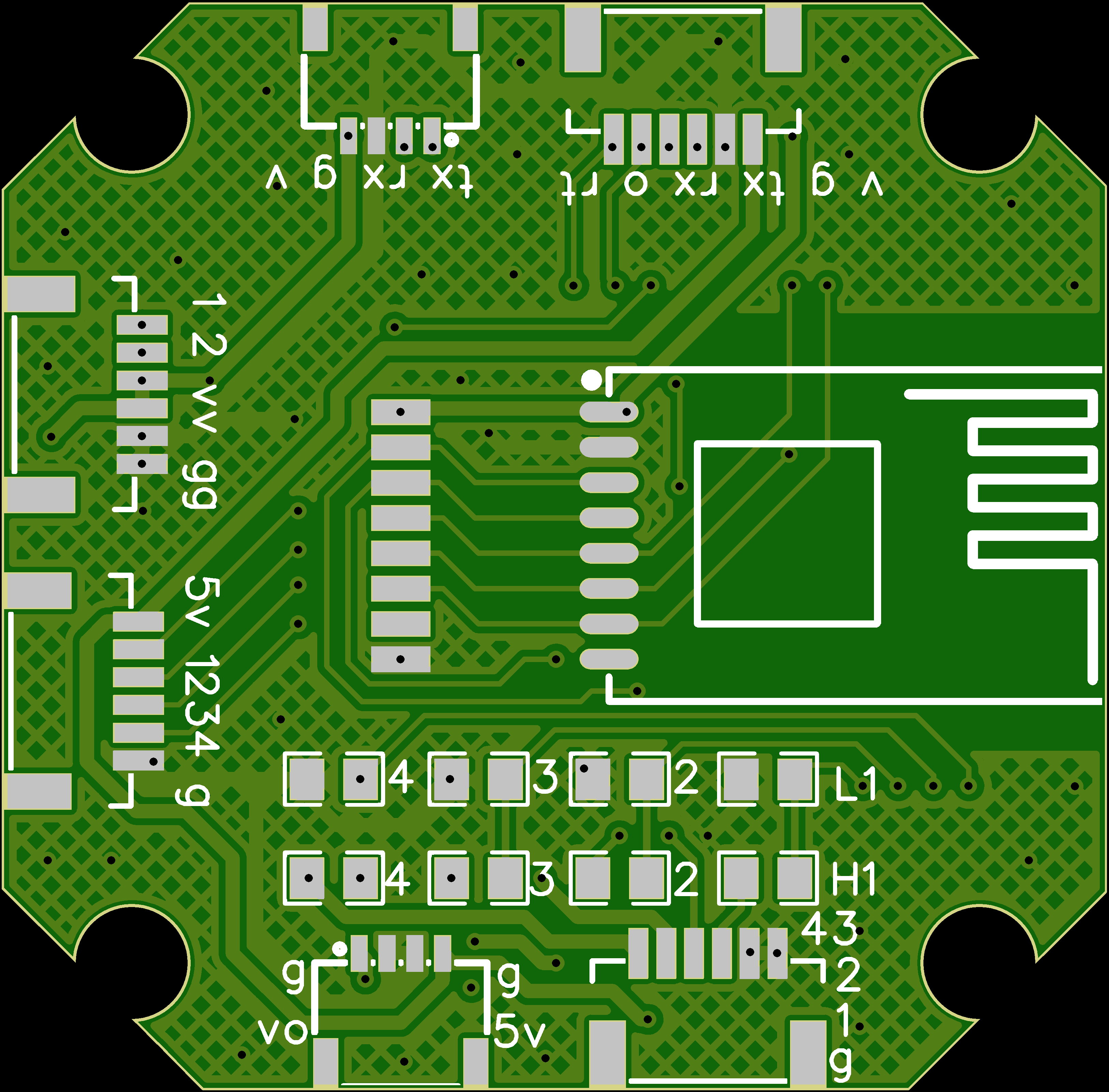
基于ESP32的四轴飞控
2应用场景
四轴飞行器
3产品概述
基于ESP32的简单四轴飞控。调参方便,支持wifi调PID。
用Arduino IDE编译,开发环境配置简单。
只支持四轴飞行器和自稳模式飞行,方便代码阅读和二次开发。
4产品参数
主控: ESP32-WROOM-UE 或 ESP32-WROOM-32D
陀螺仪+加速度计: MPU6050
电调协议 : DSHOT 或 PWM1ms-2ms 或 PWM控制功率管(要加电阻)
接收机: 板载NRF24L01 或 SBUS
固定孔距:30.5mm * 30.5mm
尺寸: 39.75mm * 39.12mm 双层板设计 双面布局
工作电压: 3.3V
工作电流: 20mA
输入电压: 5V 或 3.3V
硬件接口:JST SH1.0 smd 4P + JST SH1.0 smd 6P
(测试机型参数可在 7测试视频 找到)
机架: 任意大小
电机: 匹配您机型的无刷或有刷电机
电调: 匹配您电机的无刷或有刷电调。注意电调协议仅支持 DSHOT 和 PWM。
螺旋桨: 任意匹配您电机的螺旋桨
电池: 任意匹配您机架的电池
板载NRF24L01控制距离: 由遥控端的功率决定
5使用说明
源码用Arduino IDE编译。
1. 在 源代码/esp_quad/include/config.h 文件中设置电调协议、接收机等等。具体信息看文件中的注释。
2. 烧录。(在附件 教程 可找到详细教程)
3. 打开Aduino IDE的串口监视器,选没有结束符和250000波特率。
4. 发送 a, b, c, d, e, f, g 分别看到角度、角速度、加速度、 陀螺仪采样、电压、加速度计角度、电机输出PWM值、接收机值。
5. 确认数值没问题就可以装上飞机。
6备注
本模块是需要下载代码驱动的(硬加软),详细信息请在附件中查看代码。
本模块需要配合软件使用,附件中提供源码 ,可供二次开发。
提供的源码可通过Arduino IDE打开编译,通过USB转UART模块下载。
附件包含: 源代码 + 教程 + 焊接指南 + 推荐元件链接(仅供参考) + 3d模型-F450上PCB
飞控成本: ~= 33
USB转UART 、MPU6050模块、NRF24L01 smd/gt24 不在BOM中需自行准备。推荐链接请在附件 推荐元件链接(仅供参考) 查看。
测试机型材料链接在附件 推荐元件链接(仅供参考) 查看。打印件请在附件 3d模型-F450上PCB 查看。
不贴器件在BOM表中没有体现(R1, R2)。根据您的电池短接其中一个,具体可在 焊接指南 中查看。
如果您选择使用板载接收机,只用贴 U4 和 U5 其中一个。
SBUS接收机(外置)连 串口2 接口。如果用SBUS接收机的话分压电阻可以不焊接因为没有数据回传。
附件已放一个源BOM,仅参考。
本模块PCB打样没有丝印位置标识。元件具体数值和接口信息可在附件 焊接指南 查看。
wifi 调参步骤在 源代码/esp_quad/include/config.h 中的注释可以找到。
7测试视频
测试机型参数如下
机架: F450
电机: 2212 1000KV 无刷电机
电调: blheli_s 30A 电调
螺旋桨: 9047
电池: 3s 2200mAh 35C
(遥控端使用 NRF24l01 + PA + LNA)
板载数据回传距离: 60m
板载接收机控制距离: 900m
板载接收机安全控制距离: 500m
视频展示了在户外的飞行测试。包括前后左右移动、转圈(偏航)、绕圈。
点赞